完全自动驾驶(测试版)悬架

为了最大限度地提高安全性和责任感,如果检测到不当使用,完全自动驾驶(Beta)的使用将被暂停。不当使用是指你或你车辆的其他驾驶员收到五次 “强制自动驾驶解除”。脱离是指在驾驶员收到若干次因注意力不集中而发出的视听警告后,自动驾驶系统在剩余的行程中脱离。由司机发起的脱离不被视为不当使用,并希望司机能够做到。将你的手放在方向盘上,并在任何时候都保持注意力集中。在使用自动驾驶时,不允许使用任何手持设备。
FSD测试版功能只能按照这种悬挂方法删除,而且将在大约两周内无法使用。
完全自动驾驶(测试版)

你可以通过点击 “控制”>”自动驾驶”>”完全自动驾驶(Beta版)”并按照说明来启用完全自动驾驶(Beta版)。
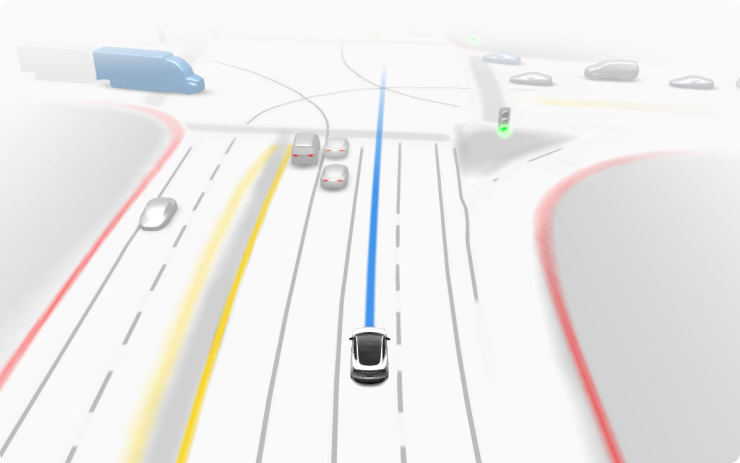
完全自动驾驶处于早期有限的测试阶段,使用时必须更加谨慎。它可能在最糟糕的时候做错事,所以你必须始终保持你的双手在方向盘上,并对道路给予额外关注。不要自满。当启用完全自动驾驶时,你的车辆将在高速公路以外的地方改变车道,选择岔路以遵循你的导航路线,在其他车辆和物体周围导航,并进行左转和右转。在有限的测试中使用完全自动驾驶,只有当你将持续关注道路,并准备立即采取行动,特别是在盲目的角落,穿过十字路口,以及在狭窄的驾驶情况下。
你的车辆在特斯拉视觉上运行!请注意,Tesla Vision也包括一些暂时的限制,跟随距离被限制在2-7,自动驾驶最高速度为85英里/小时。
FSD测试版 v10.69.25.1 发布说明
– 将物体检测网络升级为光子计数视频流,并使用最新的自动标记数据集重新训练所有参数(特别强调低能见度场景)。改进了结构,提高了精度和延迟,提高了远处车辆的召回率,将穿越车辆的速度误差降低了20%,并将VRU精度提高了20%。
– 将VRU速度网络转换为两阶段网络,减少了延迟,并将穿越行人的速度误差提高了6%。
– 将非VRU属性网络转换为两阶段网络,减少了延迟,将过路车辆的错误车道分配减少了45%,并将错误的停车预测减少了15%。
– 重新制定了自回归矢量车道语法,使车道的精度提高了9.2%,车道的召回率提高了18.7%,岔道的召回率提高了51.1%。包括一个完整的网络更新,其中所有组件都是用3.8倍的数据量重新训练的。
– 为矢量车道神经网络增加了一个新的 “道路标记 “模块,使交叉口的车道拓扑结构误差提高了38.9%。
– 升级了占位网络,使其与路面而非自我对准,以提高检测的稳定性,并改善山顶的召回率。
– 通过将昂贵的轨迹优化程序提炼成轻量级规划器神经网络,将候选轨迹生成的运行时间减少了约80%,并提高了平滑度。
– 通过对偏离路线与驶过戈壁区域所需的轨迹之间的权衡进行更丰富的建模,改进了戈壁周围短期限变道的决策。
– 通过使用更好的行人运动学模型,减少了对人行道附近行人的错误减速。
– 增加了对一般占用网络所检测到的更精确的物体几何形状的控制。
– 通过更好地模拟车辆的转弯/侧向动作,改进了对切出我们所需路径的车辆的控制,从而避免了不自然的减速。
– 通过搜索可行的车辆运动曲线,改进了在静态障碍物周围偏移的纵向控制。
– 通过在轨迹优化中考虑相对加速度,提高了车道内车辆在高相对速度情况下的纵向控制的平稳性
– 通过自适应规划器调度、重组轨迹选择和并行感知计算,将最佳情况下物体光子到控制系统的延迟减少了26%。这使我们能够做出更快的决定并改善反应时间。
– 通过对TRIP编译器、推理运行时间和处理器间通信层的改变,引入了对模型并行神经网络推理的基础性支持,在SOC间共享中间张量,以提高道路边缘和道路线预测的一致性。
– 通过改进交通灯和交叉口之间的关联逻辑,改进了对密集交叉口区域的交通控制行为的处理。
按下顶栏用户界面上的 “视频记录 “按钮,分享你的反馈。按下后,你的车辆的外部摄像头将与特斯拉工程团队分享一个简短的与VIN相关的自动驾驶快照,以帮助对FSD作出改进。你将无法查看该片段。
苹果音乐

播放超过1亿首歌曲和3万个播放列表,无广告。聆听你的整个资料库,发现更多的音乐,并调整到现场电台。要访问Apple Music,请点击应用程序启动器中的Apple Music图标。用你的移动设备扫描QR码,然后用你的Apple ID登录。
注意:需要订阅高级连接,才能通过手机连接播放苹果音乐。
Steam(测试版)

从你的特斯拉直接进入Steam商店。购买和玩已在Steam Deck上验证过的沉浸式游戏。利用Steam的云同步功能,从你的特斯拉或任何Steam设备上恢复你的游戏。要访问Steam,请点击应用启动器>街机。
注意:该功能适用于具有16GB DDR内存的Model S和X(2022年以上),并需要高级连接。
狗狗模式

在使用警犬模式或哨兵模式时,通过移动应用程序查看内部摄像头。要启用实时摄像头,点击控制>安全>通过移动应用程序查看实时摄像头。
注意:该功能需要移动应用程序4.15.0以上版本和高级连接。
媒体控制

媒体控制更贴近驾驶员,便于使用。向上滑动可进入 “回顾与收藏 “和 “来源”。向左或向右滑动,还可以访问行程和轮胎压力信息。
myQ互联车库

现在支持myQ连接的车库门开启器。使用您的车辆的触摸屏远程监控您的车库门。要进行设置,请点击控制 > 锁 > myQ Connected Garage > 链接账户,并按照说明操作。
注意:如果您已经有一个myQ账户,您的车辆将自动识别所有现有的车库门。
气候控制风扇速度

通过在气候控制弹出窗口的风扇强度选择器中选择 “低”、”中 “和 “高”,在保持自动气候的同时调整风扇速度强度。
通过移动应用程序的排放测试模式

排放测试模式现在可以从移动应用程序中使用。长按主屏幕上的任何快速控制图标,将 “放屁 “图标拖到最上面一行。
注意:该功能需要4.15.0以上版本的移动应用程序。
Zoom会议

使用机舱内的摄像头与Zoom进行视频通话。如果你的日历中有一个Zoom会议,点击链接即可自动开始或加入你的会议。参与者的视频和屏幕共享只在停车时可见,如果你开车,将切换到仅有音频。要访问Zoom,请点击应用程序启动器 > Zoom。
注意:这项功能需要高级连接。
麻将

轻松的瓷砖匹配游戏已被提升到一个干净,现代的设计,流畅的动画,和平静的声音。匹配相同的瓷砖。如果一块牌子在左边或右边是开放的,并且没有被另一块牌子覆盖,那么它就是可玩的。继续配对牌子,以清除棋盘和你的思想!要访问麻将,请点击应用程序启动器>街机。
永远的彩虹

当自动驾驶激活时,允许你的驾驶可视化显示彩虹路。要启用,请点击应用程序启动器>玩具箱>彩虹路>总是彩虹。
预定的灯光秀

提前10分钟安排灯光秀,或通过设置它们同时开始观看多车交响乐。用Auld Lang Syne表演来庆祝新年,或者创建更长的自定义表演。
要访问灯光秀,请点击应用程序启动器>玩具箱。
自动转向信号

在完成变道、岔道或并线时,转向灯可以自动停用。点选控制>灯光>自动转向灯。
联系人查询

从连接的蓝牙设备中搜索联系人。要访问,点击应用程序启动器>电话>联系人>搜索图标。
驾驶员车门解锁模式

当启用驾驶员车门解锁模式时,长按内部驾驶员车门开关将解锁所有车门和后备箱。要进入驾驶员车门解锁模式,请点击控制>锁>驾驶员车门解锁模式。
蓝牙游戏控制器

使用蓝牙控制器在街机模式下玩游戏。要配对一个控制器,请打开蓝牙面板并按照屏幕上的指示操作。这项功能对PS5控制器的效果最好。请参考《用户手册》了解更多信息。
追踪模式

赛道模式使特斯拉以性能为导向的稳定性控制和动力系统设置为赛道驾驶而配置,旨在专门用于封闭的赛道,并为高性能轮胎进行优化。追踪模式使你能够。
– 创建自定义的赛道模式设置档案,并记录你的赛道日数据。- 实时监控您的汽车电机、电池、刹车和轮胎的状态。
– 查看显示在触摸屏卡片区的G-meter(实时加速度计)。要为您当前的驾驶启用赛道模式,请换到停车位,然后点击控制>踏板和转向>赛道模式。
关于跟踪模式的更多信息,请访问《车主手册》。
自动呈现的车门把手

停在家里时,禁用自动呈现门把手。要禁用,请点选控制装置 > 锁 > 自动呈现门把手 > 不包括在家。
排除在家时自动开门

当您的车辆停在家里时,禁用自动门。要禁用,请点击控制 > 锁 > 自动门 > 排除在家时自动开门。
后屏幕控制

直接从前排座椅上控制后屏幕。在前部和后部显示器之间选择作为首选音频源,或完全锁定后部屏幕。要访问,请点击应用启动器>后排。
注意:剧院模式控制仅在停车时可用。
确认电话转移

通过蓝牙连接到车辆的移动设备的主动电话现在会在将音频传输到车辆前要求确认。
轮胎配置

在轮胎旋转、交换或更换后,直接重置所学的轮胎设置,以改善驾驶体验。要重置,请点击控制 > 服务 > 车轮和轮胎配置 > 轮胎。
再生制动

当再生制动因电池温度或充电状态而受到限制时,您的车辆现在可以自动应用常规制动,以达到稳定的减速效果。要启用,请点击控制 > 踏板和转向 > 当再生制动受到限制时应用刹车。
改善充电效率

在直流快速充电期间,热系统控制已经针对每个充电站的功率能力进行了优化,提高了充电和在途电池预处理的效率。这导致了快速充电时间和降低能源成本。
无线电站标志

媒体播放器现在显示广播电台的标志,以便在搜索最喜欢的电台时提高可发现性。
哨兵模式和狗模式

通过同时启动 “狗模式 “和 “哨兵模式”,可以保证您的车辆和宠物的安全。如果狗狗模式和哨兵模式同时启用,哨兵模式的警报会被消音。移动应用程序的通知仍将被发送,视频录像仍将被保存。
经过验证的放屁
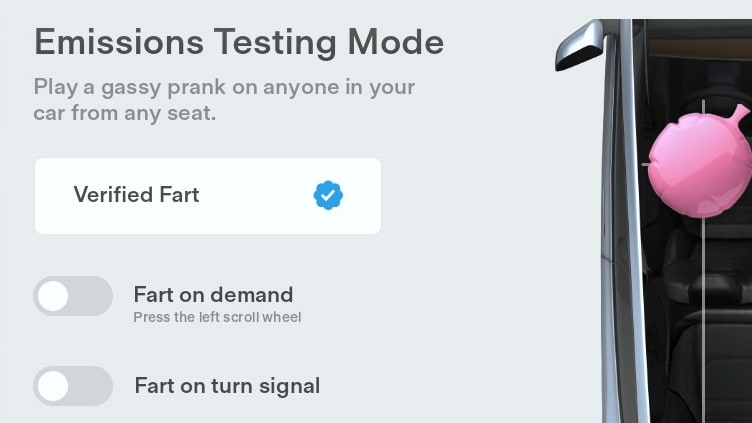
特斯拉在排放测试模式中增加了一个新的放屁。这个新屁的名字叫 “验证”,并有一个Twitter的复选标记。
将呼叫转移到车辆
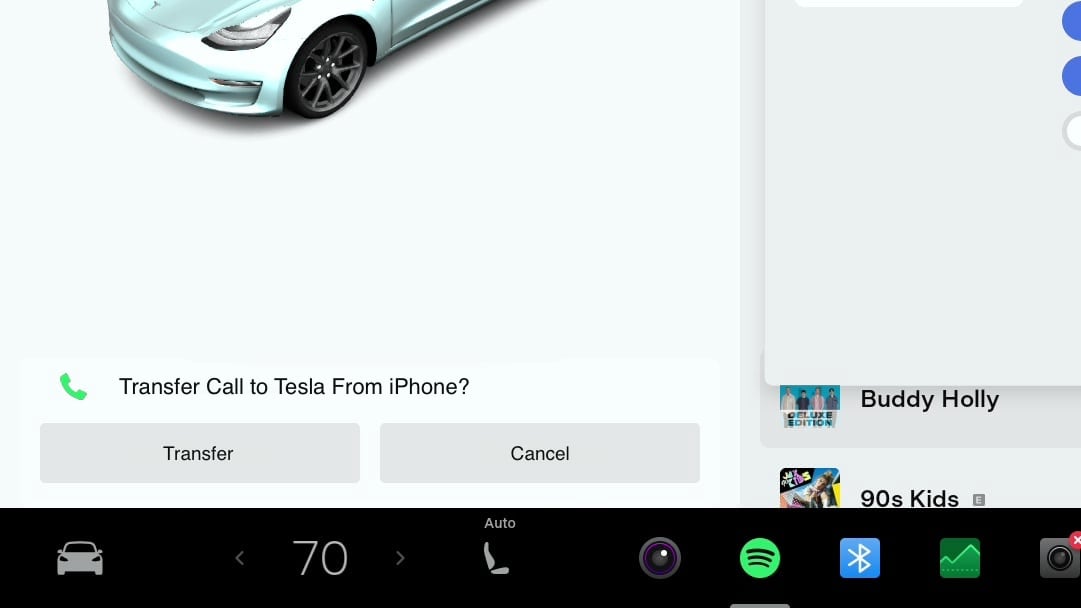
如果您在打开车门时正在打电话,您的汽车现在会询问您是否愿意将电话的音频传输到车上,而不是自动传输。
家庭链接
特斯拉已经对HomeLink在车辆中的显示位置进行了修改。HomeLink现在将出现在状态栏中,其中包括 “激活 “或 “取消 “车库门或大门开启的按钮。
如果车库门被设置为自动打开或自动关闭,状态栏还将显示信号传输前的英尺或米数。
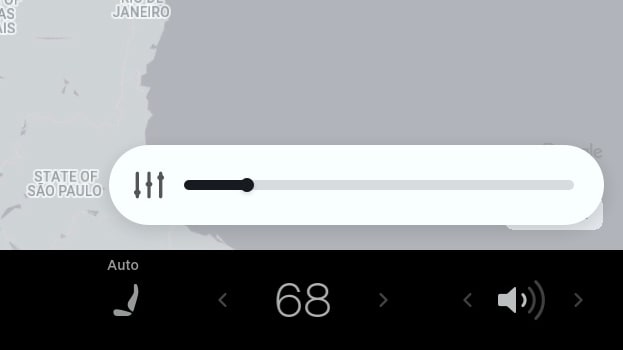
手动风扇速度
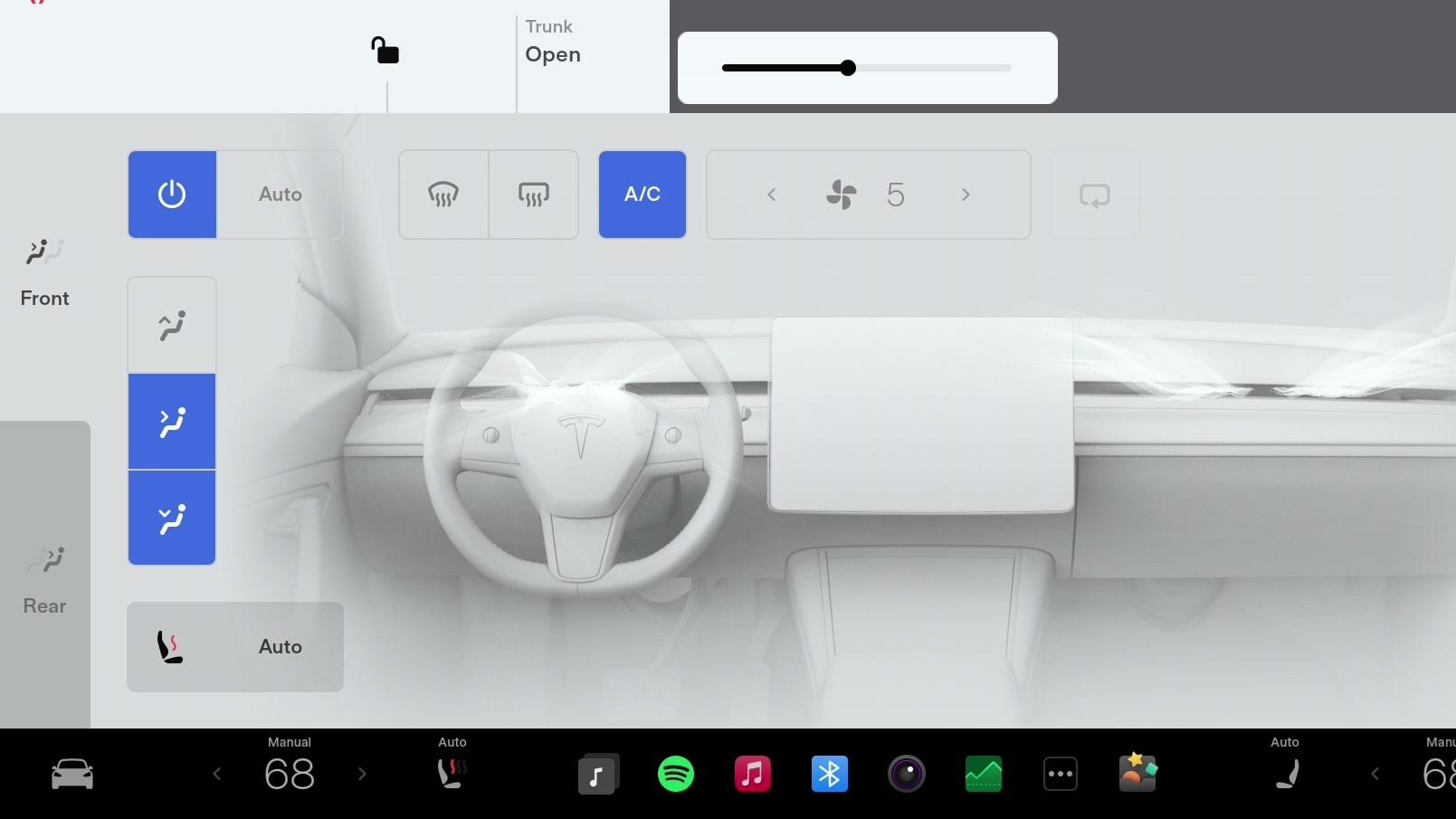
虽然当HVAC系统设置为自动时,气候控制的风扇速度已被简化,但当切换到手动时,你仍然可以获得精细的控制。
在手动模式下,你可以使用旧的1-10比例的风扇速度,以及点击或使用滑块来调整风扇速度的能力。
可刷卡
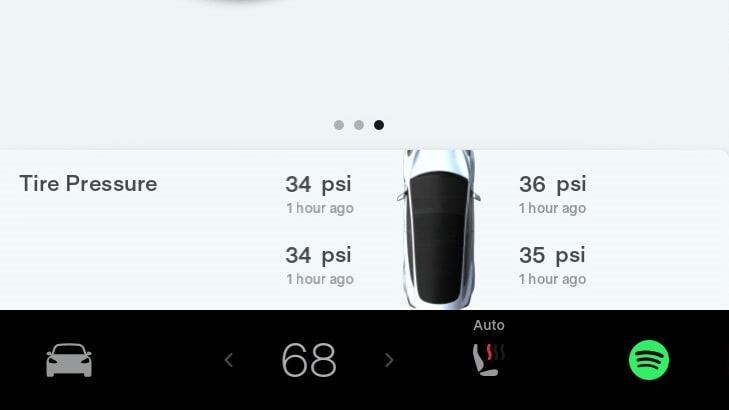
特斯拉为Model 3和Model Y重新推出了卡片。在去年的假日更新之前,特斯拉曾在屏幕的左下角为这些车型设计过卡片。
这些卡片允许你在新设计的媒体播放器、你的里程表和行程表以及你的轮胎压力之间刷卡。
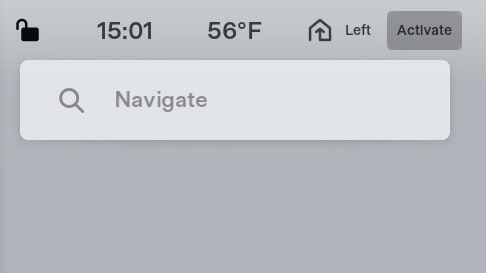
导航用户界面
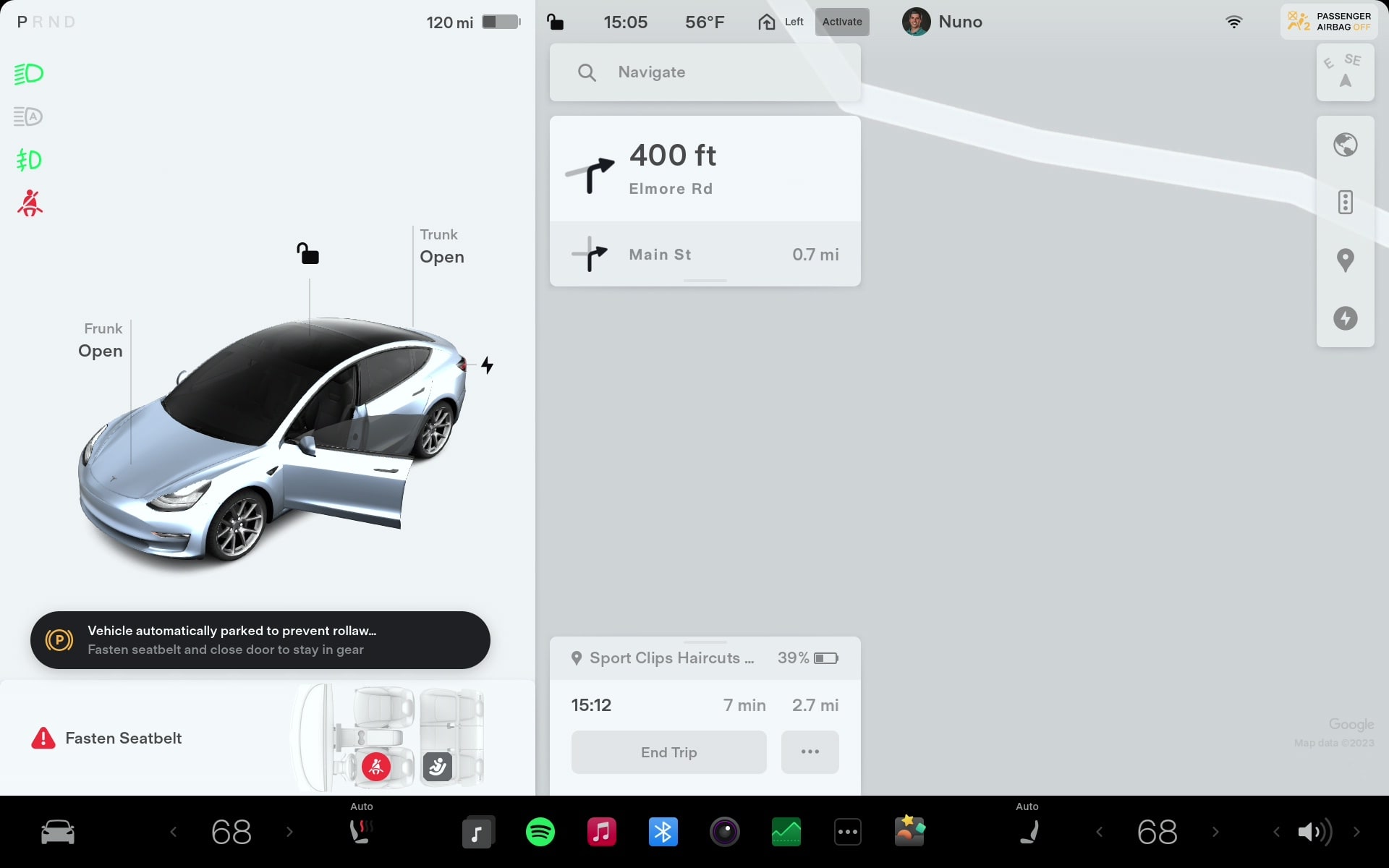
特斯拉重新设计了部分导航用户界面,以改善你的下一个转向和可用选项的布局。
以前,在屏幕的顶部有一个模块,显示你的下一个转弯,你的ETA,目的地名称或地址,以及到达时的电池水平。它还包括取消导航、切换自动驾驶导航和一个 “更多 “按钮的控制。
在这次更新中,特斯拉将这个用户界面分成了两部分。第一部分保留在屏幕的顶部,将包括关于你的路线的关键信息,如你的下一个转弯。
其余的信息被移到屏幕底部。这将包括你的旅行时间、目的地细节,以及改变或取消导航的选项。
了解更多链接
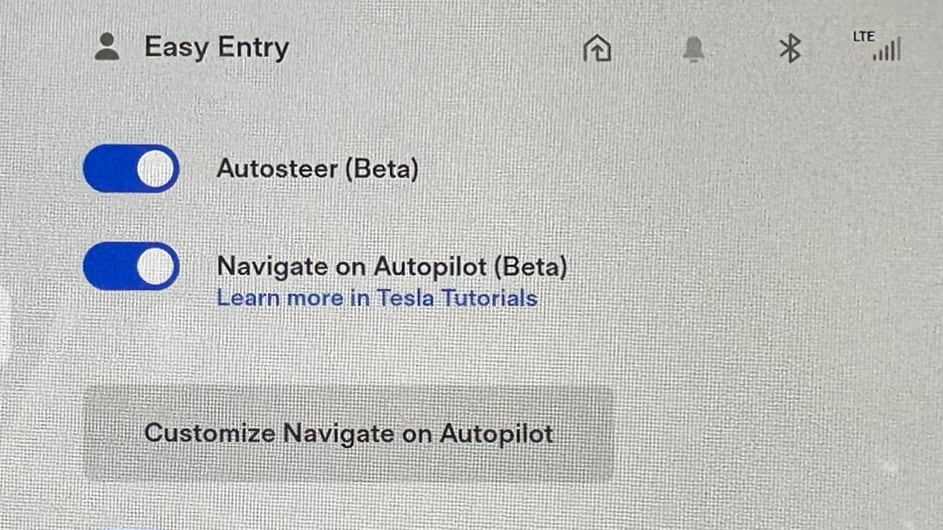
特斯拉现在将在车辆菜单中显示相关教程的链接。例如,自动驾驶菜单中的自动驾驶导航选项将有一个链接,内容是 “在特斯拉教程中了解更多信息”。
再生混合指示灯

通过这次更新,特斯拉增加了一个新的指示灯,出现在其他指示灯图标附近。
这个新的指示灯表明,由于天气寒冷或原因,再生制动受到限制。
额外的工具提示
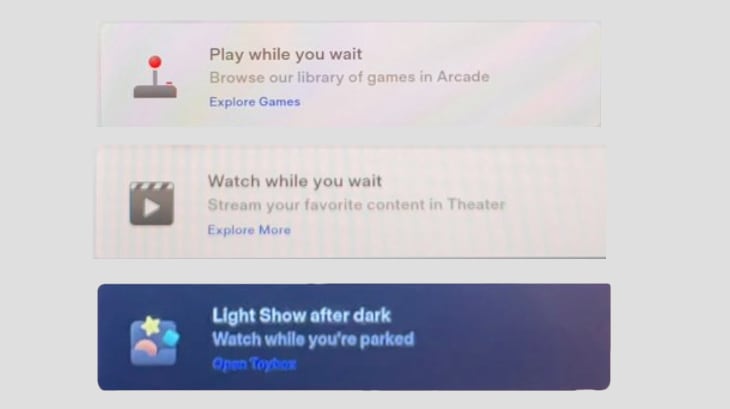
特斯拉在这次更新中增加了一些额外的工具提示。这些工具提示将被各种车辆状态所触发。例如,当你停车时,会显示灯光秀工具提示。特斯拉商场和流媒体工具提示在你开始超级充电时显示。
原创文章,作者:特来讯,如若转载,请注明出处:https://teslaside.com/ota-detail/626/
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 