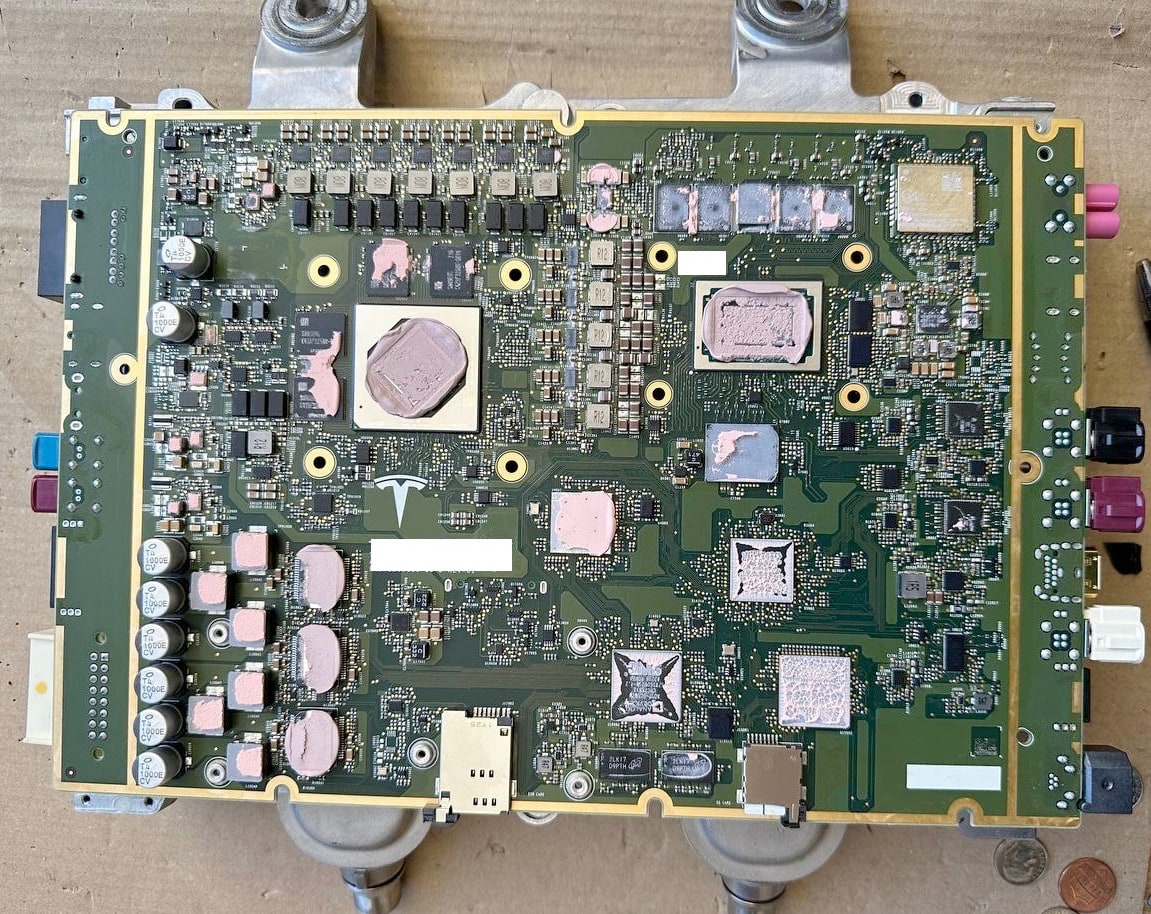

自推出以来,特斯拉的硬件4(HW4),即该公司最先进的完全自动驾驶计算机,一直被笼罩在神秘之中。著名的特斯拉黑客@greentheonly,或称Green,揭开了更多关于HW4的细节,为其技术提供了宝贵的见解。
2-SOC版本和相机布局
格林通过对固件样本的分析,发现了HW4的出货版本,内部称为2-SOC(片上系统)版本。该版本支持两种可能的摄像头布局:目前的布局,或者是增加了环视摄像头的扩展布局,如一个前保险杠摄像头和两个额外的侧面摄像头。这些摄像头可以以2880×1876的分辨率运行,并达到每秒45帧。主摄像头和备用摄像头有独特的规格,供应商尚未确定。
据报道,新的全球导航卫星系统(GNSS)是基于Teseo V平台的,而雷达系统通过以太网连接,在192.168.90.110的内部IP地址上运行。
最初的HW4相机连接器和新相机
最初,格林公司透露HW4有12个摄像头连接器,新的摄像头有望在HW4车辆中使用。然而,第一批使用HW4的车辆,特别是Model S和Model X,有新的硬件,但不包括新的摄像头。正如我们之前在Project Highland文章中所报道的,特斯拉计划在保险杠上增加一个新的摄像头,在车辆的每一侧再增加一个。
两个HW4设置和3-SOC版本
格林的最新发现显示了两种HW4设置:一种有额外的摄像头,一种没有。此外,格林的固件分析还发现了一个正在开发的3-SOC版本。这个版本的摄像头布局保持不变,但内部反序列化的路由不同。
HW4中GPU的热量输出增加,可能导致其能力的限制。3-SOC版本有可能通过提供更好的散热或为新硬件铺路来解决这个问题。然而,3-SOC版本的确切目的和发展目前仍不确定。
特斯拉Semi的相关发现
在另一个耐人寻味的发展中,格林的固件分析揭示了与特斯拉Semi有关的信息,电池管理系统(BMS)和所有三个子包可以通过内部以太网网络访问。
@greentheonly的这些发现让我们全面了解了特斯拉HW4背后的先进技术。作为市场上最先进的完全自动驾驶计算机,其潜在的应用和能力无疑对汽车行业和消费者来说是令人兴奋的。
随着特斯拉继续开发和完善其完全自动驾驶技术,解决有关其安全性、功能和与现有系统的整合问题至关重要。世界热切地等待着尖端的HW4的进一步发展以及它承诺提供的自动驾驶体验。
原创文章,作者:特来讯,如若转载,请注明出处:https://teslaside.com/tesla-fsd/2421/
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 