不当使用FSD(测试版)超过五次,FSD会被暂停
为了最大限度地提高安全性和问责制,如果检测到不当使用,将暂停使用全自动驾驶(测试版)。 不当使用是指你或驾驶你车辆的人收到五次“自动驾驶脱离”的警告。 脱离是指在驾驶员收到多次注意力不集中的音频和视觉警告后,Autopilot 系统在剩余行程中脱离。 驾驶员发起的脱离不算作不当使用,是驾驶员的预期行为。 将你的手放在方向盘上并始终保持专注。 不允许在使用 Autopilot 时使用任何手持设备。

适用车型: Model S、Model 3、Model X、Model Y
FSD测试版 v10.69.25 发行说明
将物体检测网络升级为光子计数视频流,并使用最新的自动标记数据集重新训练所有参数(特别强调低能见度场景)。改进架构以获得更好的准确性和延迟,更高的远处车辆召回率,将穿越车辆的速度误差降低了20%,并将VRU精度提高了20%。
将 VRU 速度网络转换为两级网络,这减少了延迟并将过马路行人速度误差提高了 6%。
将 Non VRU Attributes 网络转换为两级网络,这减少了延迟,将交叉路口车辆的错误车道分配减少了 45%,并将错误的停车预测减少了 15%。
重新制定了自回归矢量车道语法,将车道的精度提高了9.2%,车道的召回率提高了18.7%,岔道的召回率提高了51.1%。包括一个完整的网络更新,其中所有组件都是用3.8倍的数据量重新训练的。
在矢量车道神经网络中增加了一个新的 “道路标记 “模块,使交叉口的车道拓扑误差提高了38.9%。
升级了占位网络,使其与路面而非自我对准,以提高检测的稳定性,并改善山顶的召回。
通过将昂贵的轨迹优化程序提炼成一个轻量级的规划器神经网络,将候选轨迹生成的运行时间减少了约80%,并提高了平滑度。
通过对偏离路线与驶过峡谷所需的轨迹之间的权衡进行更丰富的建模,改进了对峡谷周围短期限变道的决策。通过使用更好的行人运动学模型,减少了行人在人行横道附近的错误减速。
增加了对一般占用网络检测到的更精确的物体几何形状的控制。
通过更好地模拟车辆的转弯/侧向动作,改进对偏离我们所需路径的车辆的控制,从而避免不自然的减速。
通过搜索可行的车辆运动曲线,改进了在静态障碍物周围偏移时的纵向控制。
通过在轨迹优化中同时考虑相对加速度,改善车道内车辆在高相对速度情况下的纵向控制平稳性。
通过自适应计划器调度、重组轨迹选择和并行感知计算,将最佳情况下物体光子到控制系统的延迟减少了26%。这使我们能够做出更快的决定并改善反应时间。
通过对TRIP编译器、推理运行时间和处理器间通信层的修改,引入了对模型并行神经网络推理的基础性支持,在SOC间共享中间张量,以提高路缘和路线预测的一致性。
通过改进交通灯和交叉口之间的关联逻辑,改进了对密集交叉口区域的交通控制行为的处理。
按下顶栏用户界面上的 “视频记录 “按钮,分享你的反馈。按下后,你的车辆的外部摄像头将与特斯拉工程团队分享一段与VIN相关的自动驾驶快照,以帮助对FSD进行改进。你将无法查看该片段。
适用车型: Model S、Model 3、Model X、Model Y
了解更多链接
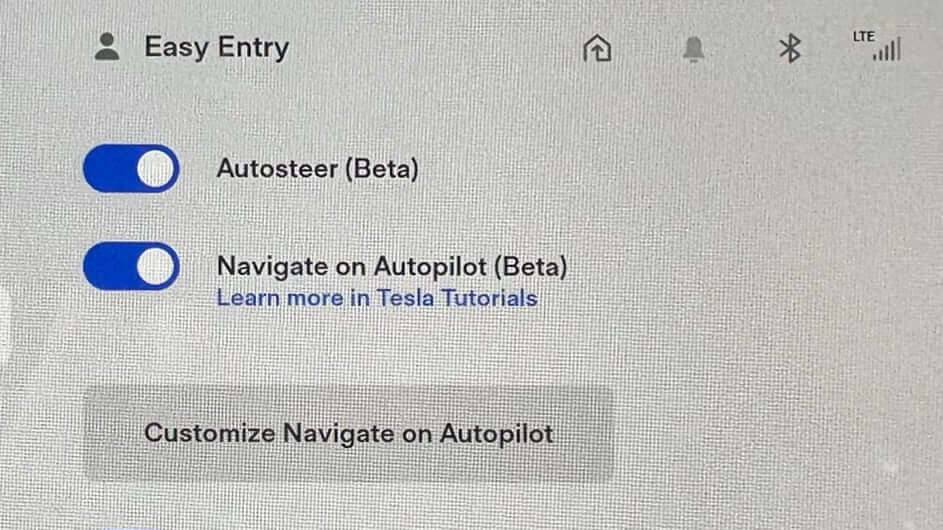
特斯拉现在将在车辆菜单中显示相关教程的链接。例如,自动驾驶仪菜单中的自动驾驶导航选项将有一个链接,上面写着’在特斯拉教程中了解更多信息’。
适用车型: Model S、Model 3、Model X、Model Y
再生混合指示灯
通过这次更新,特斯拉增加了一个新的指示灯,出现在其他指示灯图标附近。这个新的指示灯表明,由于寒冷的天气或原因,再生制动受到限制。
适用车型: Model S、Model 3、Model X、Model Y
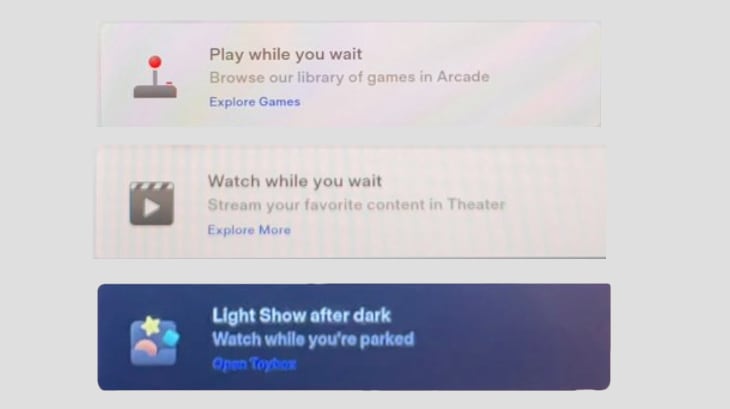
额外的工具提示
特斯拉在这次更新中增加了一些额外的工具提示。这些工具提示将由各种车辆状态触发。例如,当你停车时,会显示灯光秀工具提示。特斯拉商场和流媒体工具提示会在你开始超级充电时显示。
适用车型: Model S、Model 3、Model X、Model Y
其他
原创文章,作者:特来讯,如若转载,请注明出处:https://teslaside.com/ota-detail/99/
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 